Sicherheitslösungen für die intelligente Mensch-Roboter-Kollaboration
Die Mensch-Roboter-Kollaboration (MRK) beschreibt ein Arbeitsszenario, bei dem sich Menschen und automatisierte Maschinen den gleichen Arbeitsraum teilen und auch gleichzeitig dari...
Die Mensch-Roboter-Kollaboration (MRK) beschreibt ein Arbeitsszenario, bei dem sich Menschen und automatisierte Maschinen den gleichen Arbeitsraum teilen und auch gleichzeitig darin arbeiten. Getrieben von Industrie 4.0 verspricht dieses Modell der Zusammenarbeit hochgradig flexibilisierte Arbeitsabläufe, höchste Anlagenverfügbarkeit und -produktivität sowie wirtschaftliche Effizienz. Aber erst die jeweils applikationsspezifisch richtige Sicherheitstechnik gewährleistet, dass die MRK diese Versprechen auch einlösen kann.
Eines der großen Themen von Industrie 4.0 ist die Flexibilisierung von Arbeitsprozessen. Diese reicht im Extremfall bis hin zur Fertigung von Produkten in Losgröße 1 zu Bedingungen der industriellen Massenfertigung – sozusagen als Unikate vom Fließband. In einer solchen „smart factory“, in der Produkte und Produktionsprozesse mit der modernen Informations- und Kommunikationstechnik verschmelzen, werden zum einen immer intelligentere – und damit autonomere – Maschinen zum Einsatz kommen. Zum anderen wird in der industriellen Fertigung auch die Interaktion von Mensch und Maschine zunehmen – denn die Kombination der Fähigkeiten von Menschen mit denen von Robotern führt zu Fertigungslösungen, die sich u. a. durch optimierte Arbeitszyklen, verbesserte Qualität und mehr Kosteneffizienz auszeichnen. Gleichzeitig erfordern autonome, vor allem aber auch mit dem Menschen interagierende, Maschinen neue Sicherheitskonzepte, die die Flexibilisierung von Produktionsprozessen wirkungsvoll unterstützen.
Mensch-Roboter-Interaktion: eine Frage von Raum und Zeit
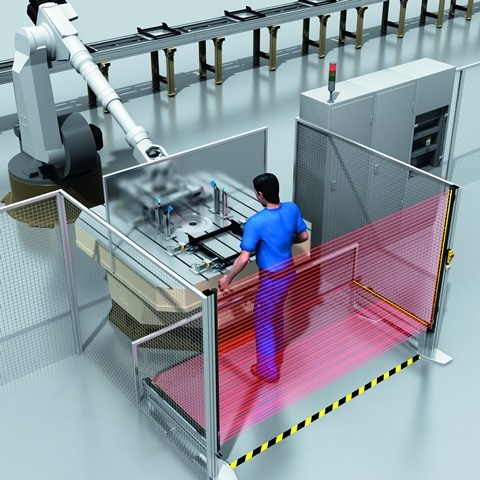
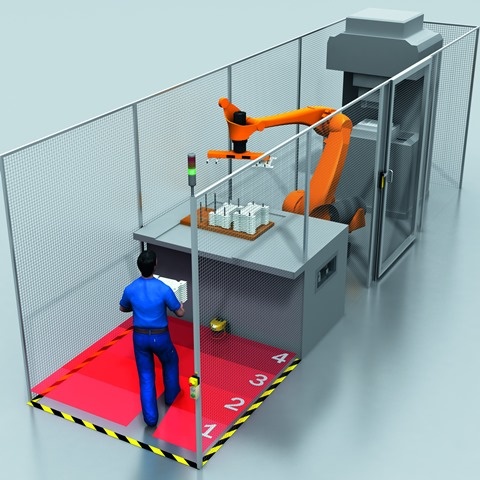
Das Zusammenspiel von Menschen und Maschinen rückt nicht erst mit Industrie 4.0 in den Fokus der industriellen Automatisierung. Bislang mit etwa 90 Prozent dominierend sind zwei Interaktionsszenarien: die Koexistenz und die Kooperation. Raum und Zeit sind hierbei die maßgebenden Interaktionsparameter. Eine Arbeitssituation, in der sich Mensch und Maschine bei der Interaktion zeitgleich in benachbarten Bereichen aufhalten, wird als Koexistenz bezeichnet. Ein typisches Beispiel hierfür ist eine Einlegestation mit Drehtisch an einer Roboterzelle. Mensch und Maschine arbeiten zeitgleich in benachbarten Arbeitsräumen, deren Übergang z. B. mit einem Sicherheits-Lichtvorhang deTec4 Prime überwacht wird. Eine Interaktion, bei der sich Mensch und Maschine einen gemeinsamen Arbeitsraum teilen, aber zu unterschiedlichen Zeitpunkten darin arbeiten, erfüllt die Bedingungen einer Kooperation. Eine solche Arbeitssituation ist beispielsweise in einer Übergabestation für einen Montageroboter gegeben. Ein Werker legt ein Werkstück ein – gleichzeitig sorgt z. B. ein Sicherheits-Laserscanner S3000 mit mehreren simultanen Schutzfeldern, die den Werker erfassen, für eine Reduzierung der Robotergeschwindigkeit oder einen sicherheitsüberwachten Halt der Roboterbewegung.
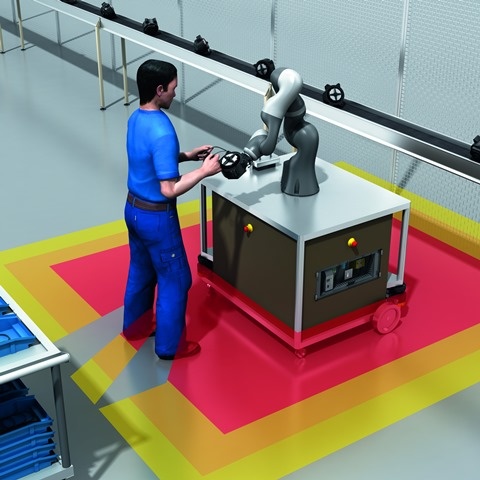
Im Rahmen von Industrie 4.0 rückt eine dritte Interaktionsform zunehmend in den Mittelpunkt: die Kollaboration von Menschen und Robotern. Hierbei teilen sich beide zum gleichen Zeitpunkt denselben Arbeitsraum. Ein Beispiel hierfür ist eine mobile Plattform mit einem Roboter, der Teile von einem Band oder einer Palette greift und nach dem Transport zu einem Arbeitsplatz dem dortigen Werker präsentiert und an ihn übergibt. In solchen kollaborativen Szenarien reichen die klassischen sicheren Detektionslösungen der Koexistenz oder Kooperation nicht mehr aus – jetzt müssen Kräfte, Geschwindigkeiten und Verfahrwege von Robotern in Abhängigkeit vom tatsächlichen Gefährdungsgrad überwacht, beschränkt und bei Bedarf gestoppt werden. Die Distanz zwischen Mensch und Roboter wird damit zu dem entscheidenden sicherheitsrelevanten Parameter.
Am Anfang steht immer die Risikobeurteilung – auch bei „Cobotern“
Keine Mensch-Roboter-Kollaboration gleicht der anderen – daher ist eine individuelle Risikobeurteilung der MRK-Applikation selbst dann erforderlich, wenn der eingesetzte Roboter speziell für die Interaktion mit dem Menschen entwickelt wurde – ein solcher „Coboter“ also schon von der grundsätzlichen Auslegung her eine Vielzahl von Merkmalen einer inhärent sicheren Konstruktion aufweist. Gleichzeitig muss auch der Kollaborationsraum grundlegende Anforderungen erfüllen, z. B. hinsichtlich von Mindestabständen zu angrenzenden begehbaren Bereichen mit Quetsch- oder Einklemmgefahren. Normative Grundlage für die funktionale Sicherheit von MRK-Anwendungen sind zum einen generelle Normen wie die IEC 61508, die IEC 62061 und die ISO 13849-1/-2. Darüber hinaus sind die ISO 10218-1/-2 zur Sicherheit von Industrierobotern und speziell die ISO TS 15066 über Roboter für den Kollaborationsbetrieb zu berücksichtigen. Entwickler und Integratoren von Robotersystemen müssen die vom Roboterbauer vorgenommenen konstruktiven Schutzmaßnahmen nicht nur sorgfältig auf ihre Normenkonformität und Funktionalitäten überprüfen, sondern auch eventuell verbleibende Gefährdungen und Risiken berücksichtigen. Hierzu gilt es, für das Robotersystem, seine Bewegungsabläufe und seinen geplanten Kollaborationsraum eine Risikobeurteilung nach EN ISO 12100 durchzuführen, um daraus die entsprechenden Sicherheitsmaßnahmen abzuleiten – z. B. die Umsetzung geeigneter Kollaborationsarten gemäß ISO/TS 15066.
Sicherheitsgerichtete Betriebsarten kollaborierender Robotersysteme
In Anlehnung an diese technische Spezifikation lassen sich vier Arten des kollaborierenden Betriebs unterscheiden. Der „sicherheitsbewertete überwachte Halt“ stoppt den Roboter zur Interaktion mit dem Menschen; bei der „Handführung“ wird die sichere MRK dadurch gewährleistet, dass der Roboter bei angemessen reduzierter Geschwindigkeit bewusst von Hand geführt wird. Bei der dritten Kollaborationsart – der „Leistungs- und Kraftbegrenzung“ – wird die erforderliche Sicherheit dadurch erreicht, dass Leistung, Kraft und Geschwindigkeit des Roboters z. B. durch Begrenzungsfunktionen der Sicherheitssteuerung auf eine biomechanische Belastungsgrenze gesenkt werden, bei der keine Gefährdungen oder Verletzungen zu erwarten sind. Dies geschieht unabhängig davon, ob ein physischer Kontakt zwischen dem Roboter und einem Mensch beabsichtigt oder unbeabsichtigt erfolgt.
Ganz im Sinne hochgradig flexibler Arbeitsszenarien – und damit von Industrie 4.0 und den Produktionsprozessen in der smart factory – ist die Kollaborationsart der „Geschwindigkeits- und Abstandsüberwachung“. Sie basiert darauf, dass die Geschwindigkeit und die Verfahrwege des Roboters überwacht und abhängig von der Arbeitsgeschwindigkeit des Bedieners im abgesicherten Kollaborationsraum angepasst werden. Sicherheitsabstände werden dabei permanent überwacht und der Roboter bei Bedarf verlangsamt, gestoppt oder sein Verfahrweg geändert. Vergrößert sich der Abstand zwischen Bediener und Maschine wieder über den Mindestabstand hinaus, kann das Robotersystem seine Bewegungen mit üblichen Geschwindigkeiten und Verfahrwegen automatisch fortführen. Dadurch wird die Produktivität des Roboters unverzüglich wieder hergestellt.
Funktionale Sicherheit für MRK: Expertise, Portfolio und Umsetzung aus einer Hand
Die Geschwindigkeits- und Abstandsüberwachung in MRK-Anwendungen bietet das größte Zukunftspotenzial der verschiedenen Kollaborationsarten der ISO/TS 15066. Im Vergleich mit diesen, aber auch mit Blick auf die bislang noch dominierenden Interaktionsszenarien der Koexistenz und der Kooperation, wird deutlich, dass die sicherheitsgerichtete Sensor- und Steuerungstechnik vor neuen Herausforderungen steht, um eine ungehinderte MRK zu ermöglichen. Hinzu kommt, dass die Anforderungen an die Sicherheit des gemeinsam genutzten Arbeitsraumes umso mehr steigen, je kollaborativer künftige Arbeitssituationen werden. Sick als Hersteller von Sensor-, Steuerungs- und Systemlösungen für die Funktionale Sicherheit sowie Anbieter von durchgängigen Sicherheitsdienstleistungen von der Risikobeurteilung über das Sicherheitskonzept bis zur Implementierung der Systemlösung besitzt hier eine umfassende Expertise bei der Auslegung sicherer Roboterapplikationen. Hinzu kommt ein Sensor- und Steuerungsportfolio, dass sich seit Jahrzehnten mit den Anforderungen sicherer Roboterapplikationen weiterentwickelt hat. Die zunehmend intelligenteren Sicherheitslösungen auf der Basis unterschiedlicher Technologien ermöglichen immer neue MRK-Anwendungen, weil sie in der Lage sind, zunehmend anspruchsvollere Anforderungen umzusetzen.
Die MRK macht derzeit nur einen kleinen Anteil aller Anwendungen mit Mensch-Maschine-Interaktion aus. Innovative Lösungen für die funktionale Sicherheit von Roboterapplikationen, wie sie bei Sick entwickelt und realisiert werden, können dazu beitragen, diesen Anteil in absehbarer Zeit signifikant zu erhöhen.
Business Partner
Sick AGErwin-Sick-Str. 1
79183 Waldkirch
Deutschland













Meist gelesen

Webinar: KRITIS und NIS2
Webinar: KRITIS und NIS2 – Ihr Fahrplan zur operativen Umsetzung in Gebäuden und Liegenschaften.

Drohnen statt Streckengänge: DB plant automatisierte Überwachung zur Abwehr von Manipulationen und Störungen
DB-Chef Hennies: Wie KI, Drohnen & Bodycams die Bahnsicherheit revolutionieren. Ein Blick auf die neue Strategie

BASF eröffnet 2028 innovatives Gefahrenabwehrzentrum in Ludwigshafen: KI-Technologie für maximale Sicherheit am Standort
BASF stärkt Sicherheit: Neues Gefahrenabwehrzentrum in Ludwigshafen mit KI & Leitstelle ab 2028

Wie digitale Fußvermessung und DGUV-konforme Einlagen Ausfallzeiten reduzieren – und Sicherheit im Betrieb stärken
Digitale Fußvermessung und Einlagenversorgung: Wie Unternehmen Ausfallzeiten senken und Mitarbeitende entlasten

20 Jahre Ciborius – 10 Jahre Innovation und Entwicklung ohne Unterbrechung
64 Mio. € Umsatz, 1.900 Mitarbeitende und 10 Jahre konsequente Innovation – Ciborius im Überblick.