AGV-Navigationstechnologien: Vor- und Nachteile im Überblick
Automated Guided Vehicles (AGVs) verändern die Intralogistik durch präzise und flexible Navigationstechnologien. In unserem neuesten Technologiebericht beleuchten wir die verschiedenen Navigationsmethoden, von der Lasernavigation über die Lasertriangulation bis hin zur optischen und induktiven Spurführung. Jede dieser Technologien bietet spezifische Vorteile, die je nach Einsatzgebiet und technischen Anforderungen variieren. Doch was ist die richtige Navigationstechnologie, um Effizienz und Sicherheit von AGVs zu maximieren?
Eine Schlüsselrolle spielt dabei die Sensorik, die für eine zuverlässige Navigation unerlässlich ist. Ob Sicherheits-Laserscanner, Lidar-Sensoren oder optische Spurführungssensoren – die Auswahl der passenden Sensorik ist entscheidend für den Erfolg der AGV-Lösungen. Und jede hat ihre eigenen Stärken und Schwächen.
Lasernavigation – besonders positionsgenau
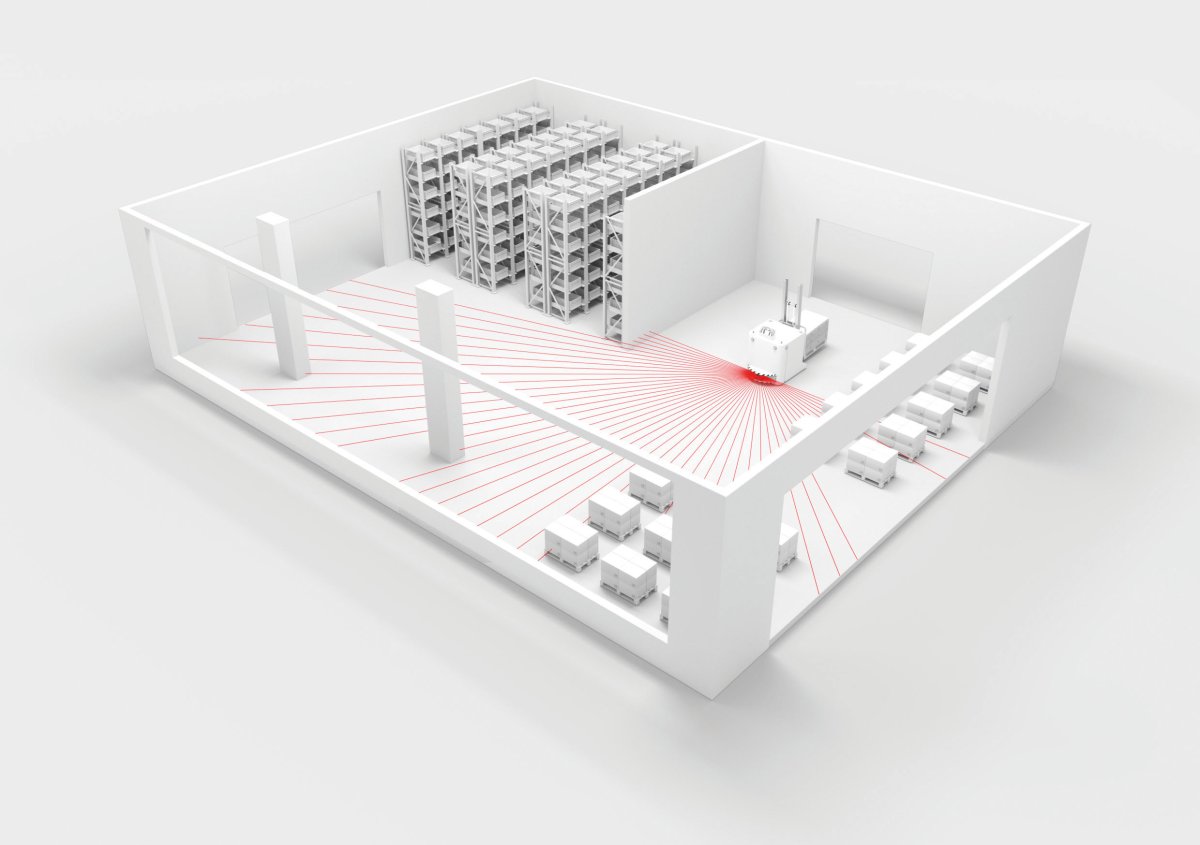
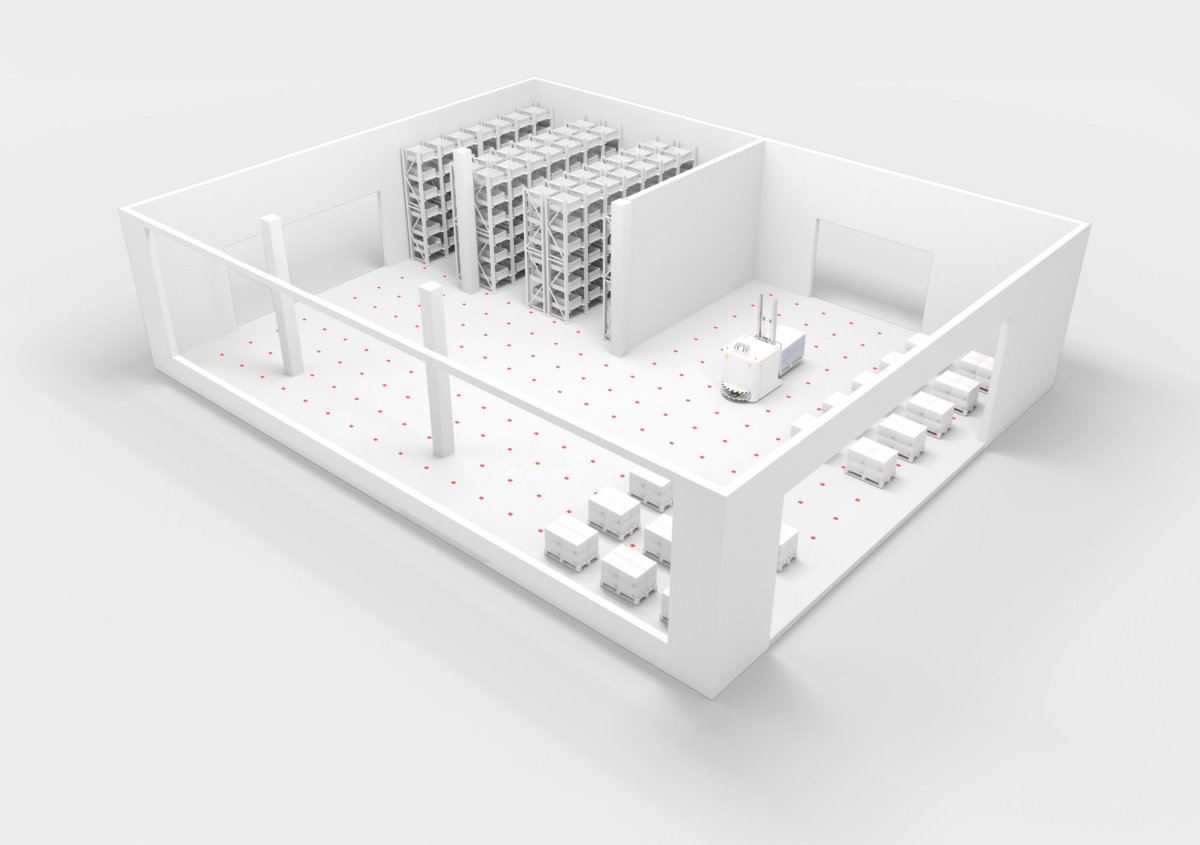
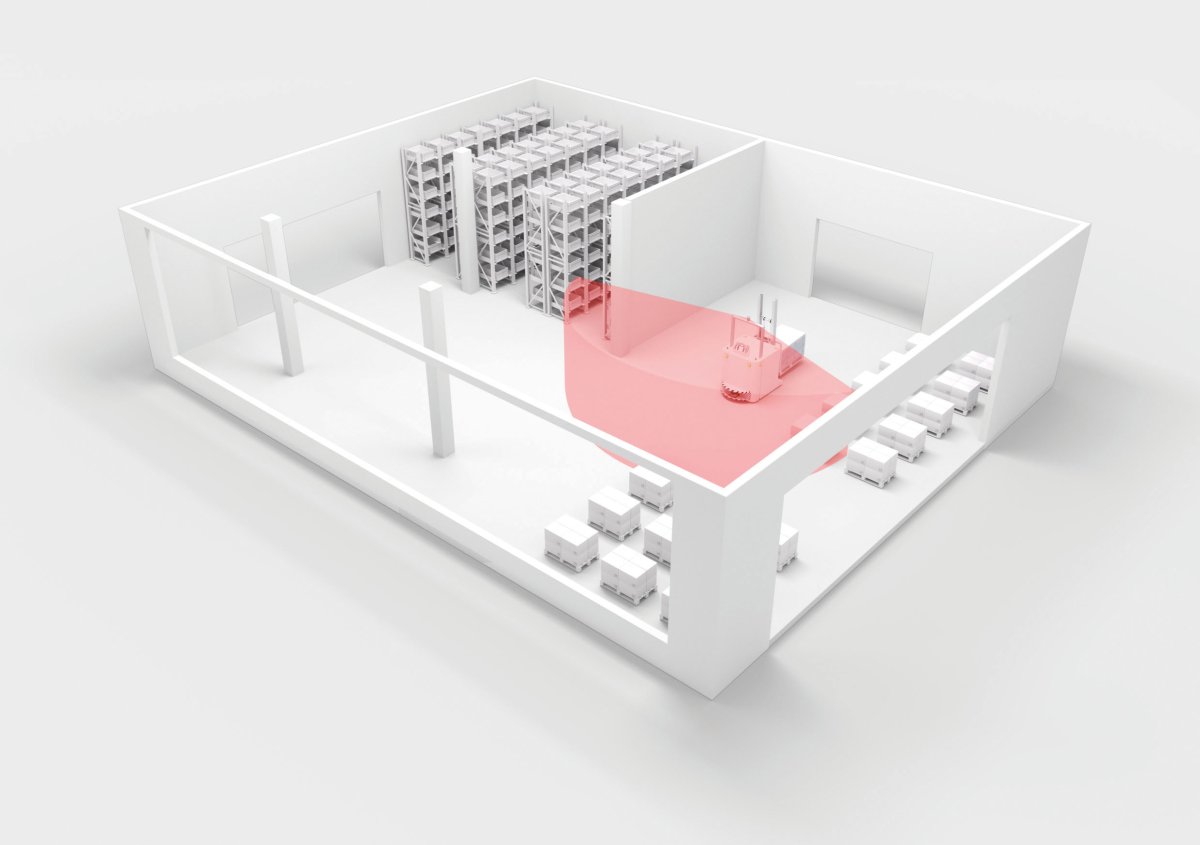
Für eine besonders präzise und flexible Navigation des AGVs empfiehlt sich die Lasernavigation, auch Konturnavigation oder Natural Navigation genannt. Diese basiert auf Laser-Scannern oder Lidar (Light Detection and Ranging). Dabei fährt das AGV zunächst im „Lernmodus“ durch seine Umgebung, erfasst per rotierendem Laserstrahl Fixpunkte und erstellt daraus eine Karte. Anhand dieser orientiert sich das AGV autonom im Raum. Hindernisse können sicher erkannt und, wenn nötig, umfahren werden. Im Vergleich zu kamerabasierten Systemen arbeitet Lasernavigation selbst in dunklen Umgebungen und bei schlechten Lichtverhältnissen. Zu beachten: Staub oder Verschmutzung kann die Präzision des Systems beeinträchtigen. Regelmäßige Wartung und Reinigung sind daher erforderlich. Zudem ist die Reichweite der Laserstrahlen begrenzt. Lasernavigation eignet sich deshalb besser für Arbeitsbereiche mit klar definierten Konturen als für weite, konturlose Umgebungen.
- Hauptvorteil der Lasernavigation:
Präzise und flexible Navigation - Einsetzbare Sensorik:
Sicherheits-Laserscanner, etwa der Sicherheits-Laserscanner RSL 400 von Leuze. Er vereint Sicherheitstechnik und Messwertausgabe in einem Gerät.
Lasertriangulation – bei dynamischen Umgebungen
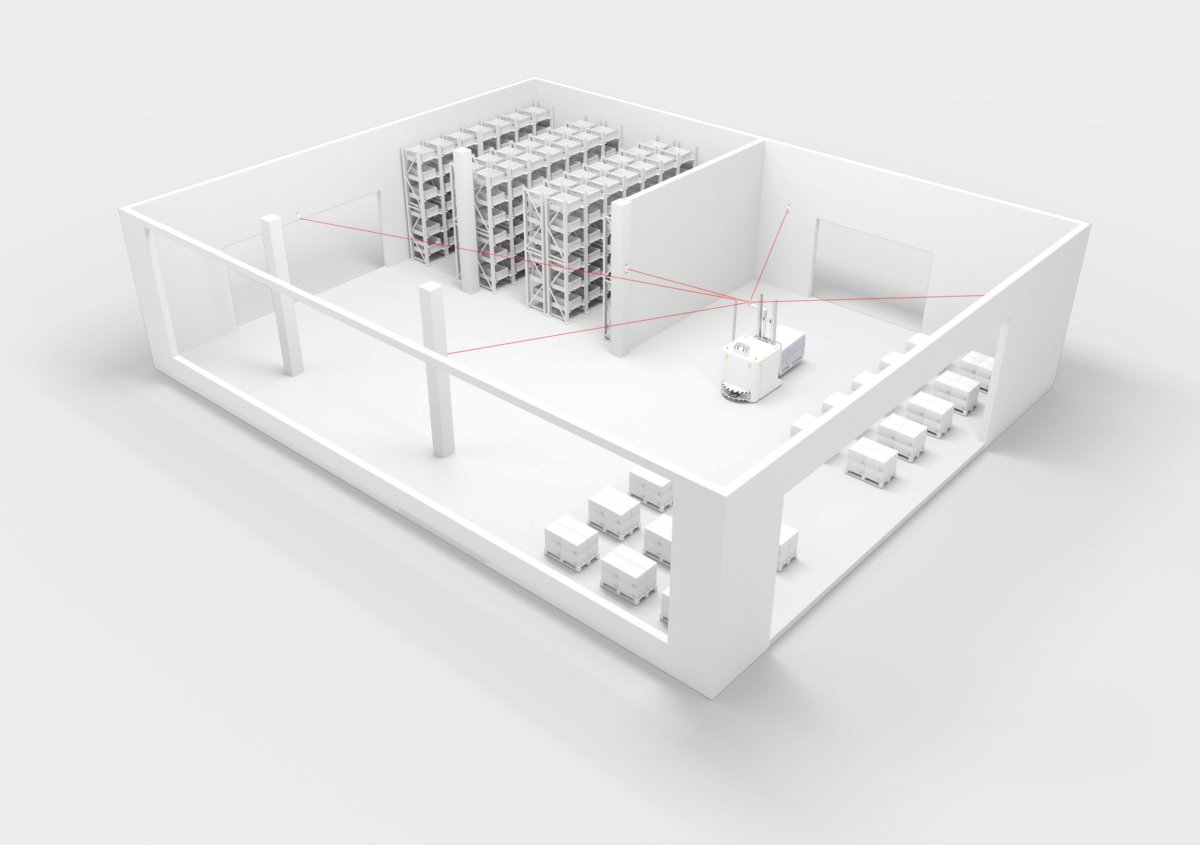
Die Lasertriangulation nutzt Reflektoren im Raum, um mit einem Laserscanner die AGV-Position zu bestimmen. Der Scanner benötigt Sichtkontakt zu mindestens drei Reflektoren, die in mehreren Metern Höhe installiert sind. Das ermöglicht eine sehr präzise Positionsbestimmung und Navigation des AGVs. Diese Technologie ist bei dynamischen, sich häufig ändernden Umgebungen sinnvoll. Kostenseitig ist einzuplanen, dass der Sensor am AGV auf Reflektorhöhe befestigt werden muss. Hinzu kommt die Installation der Reflektoren im Raum. Diese müssen für eine zuverlässige Positionsbestimmung des AGVs jederzeit erkennbar sein. Zu beachten: Für die Fahrwegabsicherung sind weitere Sensoren erforderlich.
- Hauptvorteil der Lasertriangulation:
Geeignet für dynamische Umgebungen - Einsetzbare Sensorik:
Lidar-Sensoren
Optische/Induktive Spurführung – immer dem Pfad nach
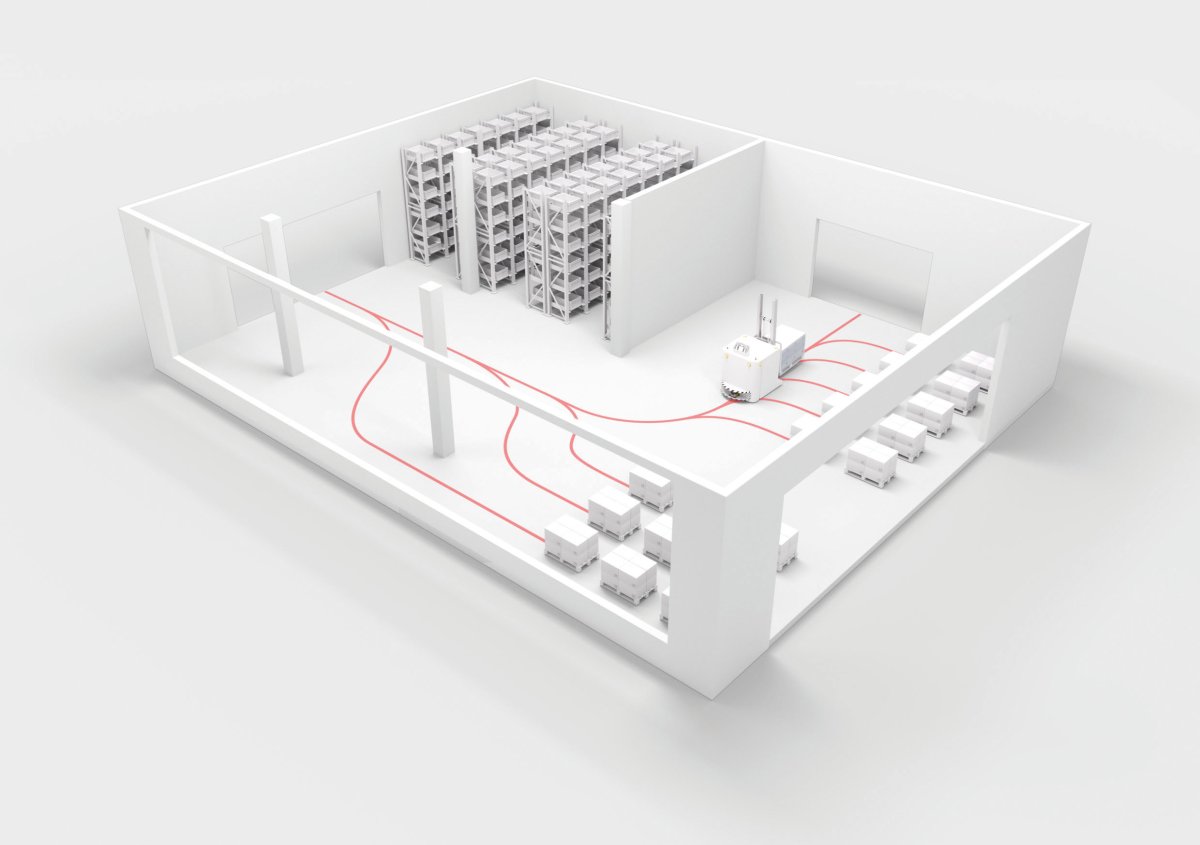
Eine weitere Art der AGV-Navigation ist die optische oder induktive Spurführung. Bei der induktiven Spurführung folgt das AGV einem im Boden verlegten Magnetband oder Induktionskabel, bei der optischen Spurführung einer auf dem Boden angebrachten Spur. Am AGV installierte Sensorik erkennt den Pfad, das ermöglicht eine präzise Ausrichtung des Fahrzeugs. Vorteil sind überschaubare Anschaffungs- und Installationskosten für die Sensorik. Diese Technologie bietet sich insbesondere für Umgebungen mit klaren und vorhersagbaren Pfaden an. Sie ist unabhängig vom Fahrzeugtyp: Der Sensor wird einfach am AGV mit geringem Abstand zum Boden angebracht. Zu den Nachteilen zählen der bauseitige Aufwand, falls Magnetband oder Induktionskabel verlegt werden. In dem Fall sind Fahrzeuge auch auf die vorher definierte Spur festgelegt. Das schränkt die Flexibilität bei neuen Layouts oder Routen ein. Darüber hinaus kann die Navigation bei vielen Kurven oder engen Passagen im Vergleich zu Lidar- oder Kameratechnologien unpräziser sein.
- Hauptvorteil der optischen/induktiven Spurführung:
Optimal für Umgebungen mit klaren Pfaden - Einsetzbare Sensorik: Optischer Spurführungssensor, beispielsweise der OGS 600 von Leuze. Der Sensor erkennt mittels Kantendetektion die Spur und sendet entsprechende Signale an die Steuerung.
Rasternavigation – Navigation nach Struktur
Die Rasternavigation basiert auf einem Koordinatensystem. Es besteht aus 2D-Codes auf dem Boden oder aus im Boden eingelassenen Transpondern. Diese sind rasterartig angebracht und dienen als Referenzpunkte, über die das AGV seine Position bestimmt. Das AGV bewegt sich auf vordefinierten Rasterwegen. Diese Technologie lässt sich einfach implementieren. Das Koordinatensystem ermöglicht eine präzise Positionsbestimmung und hohe Navigationsgenauigkeit. Sinnvoll ist eine Rasternavigation vor allem in Umgebungen mit vorhersehbaren und strukturierten Wegen. Etwa in Lagern oder Produktionsstätten mit klaren Fahrspuren. Nachteil ist die geringe Flexibilität bei neuen Routen oder sich häufig ändernder Umgebung. Die Installation von Transpondern erfordert zudem physische Eingriffe in den Boden.
- Hauptvorteil der Rasternavigation:
Empfehlenswert bei klaren Fahrspuren - Einsetzbare Sensorik:
2D-Codeleser, etwa der DCR 200i von Leuze. Am AGV installiert, liest der Sensor die Codes beim Überfahren. Vorteile sind die äußerst kompakte Bauform und der große Arbeitsbereich von 40-360 mm.
Kamerabasierte Navigation – flexibel fahren
Bei der kamerabasierten Navigation oder Vision Guidance erfassen Kameras Markierungen oder Muster in der Umgebung. Die Navigationssoftware nutzt diese Daten zur Positionsbestimmung und Navigation des AGVs. Hauptvorteil ist die hohe Flexibilität, wenn sich Wege häufig ändern. Allerdings arbeiten kamerabasierte Systeme bei schlechtem Licht oder schwachen Kontrasten oft nur eingeschränkt. Zudem ist ihre Reichweite begrenzt, Objekte in größerer Entfernung lassen sich nicht immer präzise erkennen. Im Vergleich zu anderen Navigationsmethoden kann die Implementierung kamerabasierter Systeme ins Gesamtsystem komplexer sein. Auch die Anschaffungskosten sind oft höher, investiert werden muss in hochwertige Kameras und in Bildverarbeitungstechnologie.
- Hauptvorteil der kamerabasierten Navigation:
Flexibel bei sich häufig ändernden Wegen - Einsetzbare Sensorik:
ToF-Kameras
Autor:
Matthias Göhner,
Global Industry Manager Intralogistics bei Leuze