Was ist eigentlich …EIN SICHERER KARTESISCHER ARBEITSRAUM?
Der „sichere kartesische Arbeitsraum“ ist ein Begriff aus der Welt der Robotik. Zunächst zum Begriff „Arbeitsraum“

Der „sichere kartesische Arbeitsraum“ ist ein Begriff aus der Welt der Robotik. Zunächst zum Begriff „Arbeitsraum“: dieser beschreibt die Summe all der Wege, Punkte und Positionen im Raum, die für einen Roboter aufgrund seiner Kinematik im Dreidimensionalen erreichbar sind. Dabei kann ein Arbeitsraum je nach Anzahl der Achsen und der damit verbundenen Freiheitsgrade variable geometrische Formen haben.
René Descartes lässt grüßen
Der Begriff „kartesisch“ geht zurück auf den französischen Mathematiker René Descartes (1596 – 1650), der das System der „kartesischen Koordinaten“ für den zwei- und dreidimensionalen Raum eingeführt hat. Ein kartesischer Arbeitsraum spannt sich beispielsweise als Kubus auf – in seinen Dimensionen definiert durch die in der Anwendung gegebene Bewegungsmöglichkeit eines Roboters in x-, y- und z-Richtung.
Arbeitsraum = Gefährdungsraum
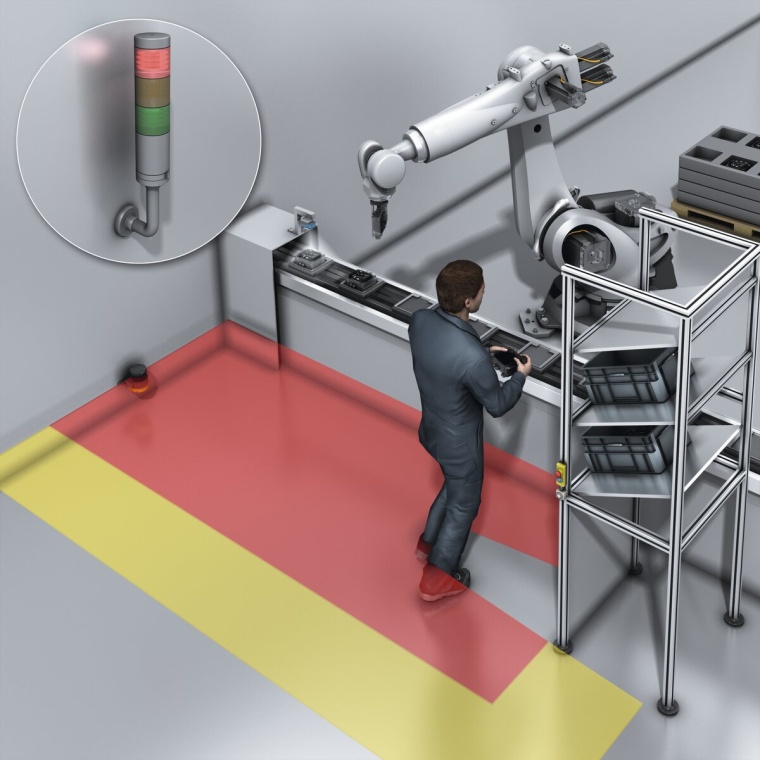
Der sichere kartesische Arbeitsraum eines Roboters ist die Umgebung, die der Roboter im bestimmungsgemäßen Betrieb, aber auch beispielsweise bei einer steuerungstechnischen Fehlfunktion, nicht verlassen darf. Befindet sich eine Person während des laufenden Betriebes im Arbeitsraum, besteht höchste Unfallgefahr.
Mechanisch trennende oder berührungslos wirkende Schutzeinrichtungen
Abgesichert werden kann der Arbeitsraum des Roboters grundsätzlich durch mechanisch trennende Schutzeinrichtungen. Der Roboter ist dabei für eine Person nicht ohne Weiteres zugänglich, sondern nur über Zugänge durch die Umzäunung, die ihrerseits durch sichere Sensoren oder Schalter überwacht werden. Ein Nachteil dieser Maßnahmen ist, dass auch Material nicht ohne weiteres zum Roboter transportiert oder von dort weggebracht werden kann – sondern durch sicherheitsüberwachte Öffnungen in der Umzäunung hindurchgeführt werden muss.
Eine Kollision außerhalb des Arbeitsraums z. B. mit dem Schutzzaun verursacht kostenintensive Schäden. Zudem führt ein Werkzeugschaden zum Produktionsstillstand.
Alternative Schutzmaßnahme, um einen sicheren Arbeitsraum zu gewährleisten, ist der Einsatz von berührungslos wirkenden Schutzeinrichtungen. Dazu zählen Laserscannern, Lichtvorhängen oder Lichtschranken. Diese erzeugen keinen mechanischen-taktilen Schutz, sondern eine „sensorische“ Absicherung des Arbeitsraums: Beim Betreten von unsichtbaren 2D-Schutzfeldern oder der Unterbrechung von Lichtschranken wird die gefahrbringende Bewegung – je nach Sicherheitskonzept – entweder sofort angehalten oder ihre Geschwindigkeit zunächst reduziert, bevor es zum sicheren Stopp kommt.
Robotersicherheit von innen heraus
Moderne Roboter besitzen heute integrierte und normgerechte Sicherheitsfunktionen. Sie basieren zum einen auf der EN 61800-5-2, die die sicheren Betriebsarten und die Funktionsweise von einzelnen Antriebsachsen definiert. Zum anderen beschreibt die ISO 10218 die sicherheitsrelevanten Anforderungen für Roboteranwendungen. Auf diesen Grundlagen beruht die sichere Positionsüberwachung von Robotersystemen und aller jeweiligen Roboterachsen. Sie ist als flexibel parametrierbare Überwachungsfunktion implementiert. Sicherheitszertifizierte Motor-Feedback-Systeme liefern die dazu nötigen, absoluten digitalen Positionswerte, um normgerechte Funktionen einfach zu realisieren.
Motor-Feedback-Systeme EES/EEM37: sichere Positionserfassung im kartesischen Arbeitsraum
Um eine sichere Überwachung des kartesischen Arbeitsraums zu gewährleisten, berechnet die Robotersteuerung die Positionswerte der einzelnen Achsen als gesamte Kinematik und steuert damit die Bewegungskoordinaten des Werkzeuges. Ist nun sicherzustellen, dass der Roboter, inklusive Werkzeug und dem Lastgegenstand, den definierten Arbeitsraum der Anwendung nicht verlässt, ist eine sichere Rückrechnung – eine sogenannte Rückwärtstransformation – notwendig. Diese führt die Werte aus dem Raum auf die drei linearen Achsen eines kartesischen Koordinatensystems – die des sicheren kartesischen Arbeitsraums – zurück. Diese komplexe Überwachung der Rückwärtstransformation basiert auf den tatsächlich gemessenen Ist-Daten der Motor-Feedback-Systeme, welche in jeder Achse verbaut sind. Ermitteln die Motorgeber sichere single-turn Positionen, schließt sich die Kette der sicheren Daten und ist ohne wiederholtes Referenzieren zu betreiben. Dabei werden die Auswertedaten digitalisiert sowie die Sicherheitszertifizierung der gesamten Lösung vereinfacht. Motor-Feedback-Systeme wie das EES/EEM37 von Sick gewährleisten so die Einhaltung des sicheren kartesischen Arbeitsraums durch Roboter.
Business Partner
Sick AGErwin-Sick-Str. 1
79183 Waldkirch
Deutschland













Meist gelesen

Wie digitale Fußvermessung und DGUV-konforme Einlagen Ausfallzeiten reduzieren – und Sicherheit im Betrieb stärken
Digitale Fußvermessung und Einlagenversorgung: Wie Unternehmen Ausfallzeiten senken und Mitarbeitende entlasten

Wie mobile Videotürme Baustellen, Energie und Infrastrukturprojekte schützen – Marktanalyse zeigt dynamisches Wachstum und neue Wettbewerbsstrukturen
Mobile Videoüberwachung boomt: Warum Videotürme heute Baustellen, Energie- und Infrastrukturprojekte effektiv schützen

BASF eröffnet 2028 innovatives Gefahrenabwehrzentrum in Ludwigshafen: KI-Technologie für maximale Sicherheit am Standort
BASF stärkt Sicherheit: Neues Gefahrenabwehrzentrum in Ludwigshafen mit KI & Leitstelle ab 2028

Generationenwechsel bei Elten: Hendrik van Elten über Wachstum, Marke und neue Anforderungen an Sicherheitsschuhe
Elten im Wandel: Hendrik van Elten über internationales Wachs-tum und moderne Sicherheitsschuhe

Webinar: KRITIS und NIS2
Webinar: KRITIS und NIS2 – Ihr Fahrplan zur operativen Umsetzung in Gebäuden und Liegenschaften.